Ongoing
SWARMS
NEURAL NETS
MAST CTA
NSF CAREER
Past
URPR
/ LANL MOU
SURP
|
Swarms
that "hear the shape of the drum"
Funded by:
NSF
The concept in this
research effort is to develop robotic swarms that collectivly
make up a spattially distributed associate memory, that
is robust to noise and uncertainty. Basically, a distributed
neural network is implemented in locally interconnected
chunks over the swarm members. This robot swarm would ultimately
fall into formation, scan an area of interest and collect
measurements, and decide on the pattern of the data collected
on their own, without human supervision. |
|
Publications
coming soon... |
Micro
Autonomous System Technologies
Funded by:
US
Army Research Lab
Processing
for Autonomous Operation
The vision of the Autonomous
Operations group, consisting of several groups from academia
(UPenn, Berkeley, GATech, UNM, MIT, Univ of Sydney, Vanderbilt,
and Univ of Maryland) and industry (BAE Systems) is to develop
Autonomous Multifunctional Mobile Microsystems (Am3), a
networked group of small vehicles and sensors operating
in dynamic, resource-constrained, adversarial environments.
While individual units may be specialized, Am3 will be multifunctional
because of its heterogeneity, the ability of individual
units to automatically reconfigure and adapt to the environment
and to human commands, and its distributed intelligence.
Am3 will need to operate with little or no direct human
supervision, because groups like this will be very difficult,
if not impossible, to efficiently manage or control by programming
or by tele-operation. The deployment, monitoring, and tasking
of such multifunctional groups will be challenging and will
require the application of new, yet-to-be-developed methods
of communication, control, computation and sensing, specifically
tailored to Mast applications.
In this effort, UD works
closely with UNM, UPenn and Berkeley to develop algorithms
that would enable robotic crawlers to navigate optimally
in uncertain and complex environments. Our approach is based
on a combination of artificial potential fields (navigation
functions), and model predictive control design using randomized
algorithms. |
 An
AM3 prototype. Such bioinspired vehicles are envisioned
to work in groups to provide situational awareness. An
AM3 prototype. Such bioinspired vehicles are envisioned
to work in groups to provide situational awareness.
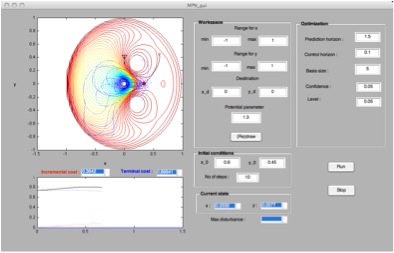
The graphical user interface of a matlab
tool we developed for simulating receding horizon control
strategies. The control design aims at communication-aware
navigation in uncertain, cluttered environments, and utilizes
randomized algorithms.
|
Publications
Herbert G. Tanner and Jorge L. Piovesan,
"Randomized Receding Horizon Navigation,"
IEEE Transactions on Automatic Control, 2009 (submitted)
Jorge Piovesan and Herbert Tanner,
"Relaxed stability conditions for switching
systems," Systems and Control Letters,
2009 (submitted)
Jorge Piovesan and Herbert Tanner,
“Randomized
Model Predictive Control for Robot Navigation,”
IEEE International Conference on Robotics and Automation,
2009, pp. 94-99 |
Formal
Cooperative Planning
of Decentralized Robot Actions
Funded
by:
NSF
Overview
The goal in this project is to develop
a methodology with which groups of robots of different types
can decide on their own how to put together their capabilities
in order to solve cooperatively problems that none alone
can solve. The envisioned methodology has several stages,
in which decentralized group controllers are first designed
to make each homogeneous group behave as a single entity,
then the controlled group behaviors are modeled as letters
of a behavioral alphabet, and finally cooperative grammars
are synthesized to allow the composed heterogeneous systems
to reason about how to jointly work together to complete
the task. Our proposed composition of behaviors demonstrates
that the whole can be more than the sum of the parts
This material
is based upon work supported by the National Science Foundation
under Grant No. 00447898. Any opinions, findings and conclusions
or recommendations expressed in this material are those
of the author(s) and do not necessarily reflect the views
of the National Science Foundation.
|
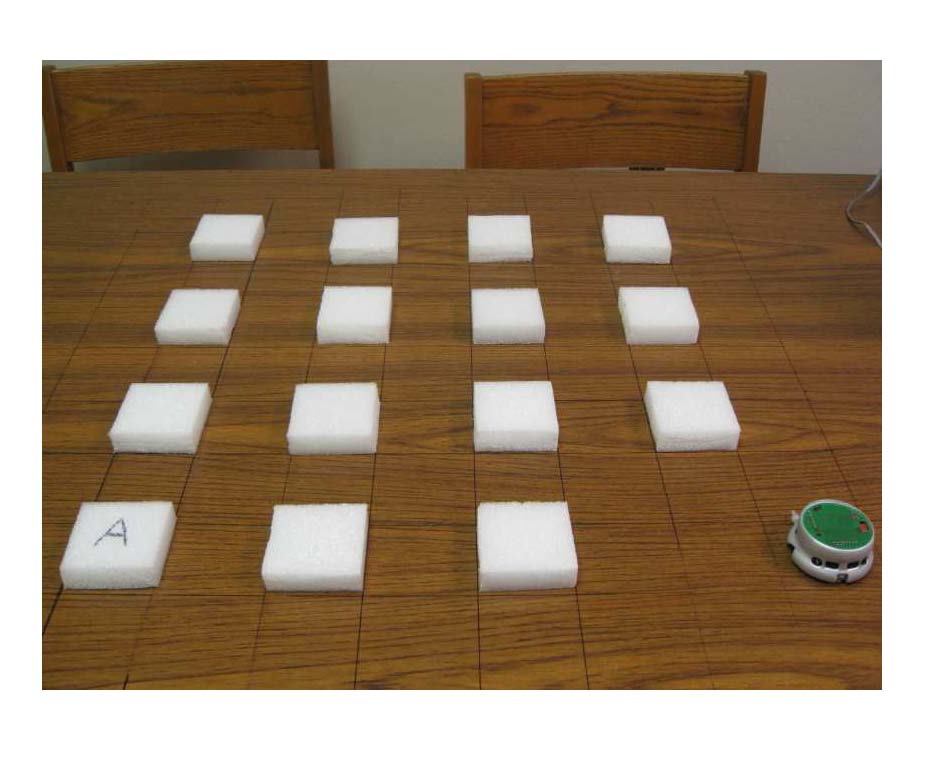
A mobile robot solves an instance of a
sliding block puzzle by figuring out on its own how to
reposition block A into a position diagonally up and to
the right.
Watch the video here |
Publications
Ye Yuan and Herbert G. Tanner, "Sensor
graphs for guaranteed cooperative localization performance,"
Control and Intelligent Systems, 2010 (to appear)
Herbert G. Tanner, Jorge L. Piovesan
and Chaouki T. Abdallah, "Finite asymptotic
abstractions for hybrid systems with stable continuous dynamics,"
Journal of Discrete Event Dynamical Systems, 2009
(submitted)
Jorge L. Piovesan, Chaouki T. Abdallah,
and Herbert G. Tanner, “Modeling Multi-Agent
Systems with Hybrid Interconnected Dynamics,”
American Control Conference, 2009 (to appear)
Jorge L. Pioveasn, Chaouki T. Abdallah
and Herbert G. Tanner, "Preliminary Results
on Interconnected Hybrid Systems." 16th Mediterranean
Conference on Control and Automation, pp. 101-106.
Wenqi Zhang and Herbert G. Tanner,
"Composition of Motion Description Languages,"
Hybrid Systems: Computation and Control, M. Egerstedt and
B. Misrha (eds), Springer 2008
A. Clauset, H.G. Tanner, C.T. Abdallah,
and R.H. Byrne, "Controlling across complex
networks; emerging links between networks and control,"
IFAC Control Engineering Practice, 32:183-192, 2008.
Jorge L. Piovesan, Chaouki T. Abdallah,
and Herbert G. Tanner, "A Hybrid Framework
for Resource Allocation among Multiple Agents Moving on
Discrete Environments," Asian Journal of Control,
10(2):171-186, 2008
A. Closet, B. Tanner, R. Byrne and
C.T. Abdallah, “Controlling Across Complex
Networks: Emerging Links between Networks and Control,”
Proceedings of the IFAC Time-Delay Symposium, Nantes France,
2007.
D. Kumar and H.G. Tanner, “How
Sensor Graph Topology Affects Localization Accuracy,”
European Control Conference, 2007 pp. 868-873
Jorge Piovesan, Chaouki T. Abdallah,
Magnus Egerstedt, Herbert Tanner and Yorai Wardi, “Statistical
Learning for Optimal Control of Hybrid Systems,”
IEEE American Control Conference, 2007, pp 2775-2780
Herbert Tanner, Jorge Piovesan,
Chaouki T. Abdallah, "Discrete Asymptotic Abstractions
of Hybrid Systems," 45th IEEE Conference on
Decision and Control, pp 917-922
Herbert G. Tanner and Amit Kumar,
"Formation Stabilization of Multiple Agents
Using Decentralized Navigation Functions,"
Robotics: Science and Systems I, S. Thrun, G. Sukhatme,
S. Schaal and O. Brock (eds), MIT Press, 2005, pp 49–56. |
Distributed
Cooperative Robotic Radiation Mapping
Funded by:
DoE
Overview
Both in emergency management as well
as nuclear non-proliferation, time and personnel may be
a critical resource in limited supply. Robots can help in
providing quick situational awareness and assessment by
working in groups mapping radiation levels over certain
areas of interest. In this project we focused on detecting
and mapping the presense of weakly radioactive sources:
small isolated specs of radioactive material (gamma emitters),
or larger quantities of shielded special nuclear material
(alpha emitters). In such cases, the search needs to take
into account the statistics of nuclear measurement, and
results are presented at certain levels of confidence, depending
on the exposure time of the radiation detector. Our approach
to cooperative search and mapping is based on prioritizing
measurement collection using the mutual information associated
with each local measurement. Thus, robots take measurements
first in locations where data maximize the operator's knowledge
about his workspace, and reduce the uncertainty of the map
in a locally optimal way. The radiation map that robots
construct is built incrementally, the most interesting locations
are mapped first, and the map's confidence increases as
more time for measurement collection becomes available.
We recently (August 2008) extended
this methodology to the case where mutliple different maps
(e.g. radiation and temperature) are concurrently constructed,
by combining the information content of all sensing modalities. |

A Khepera II mobile robot interfaced with a small CsI (Cesium
Iodide) radiation sensor and the associated electronics
for signal processing.

Khepera II robots simulate radiation mapping by filtering
IR readings (from the red light source) through a Poisson
process. Robots localize by triangulating their Cricket
distance measurements.
Watch the video
here. |
Publications
R.A. Cortez, X. Papageorgiou, H.G.
Tanner, A.V. Klimenko, K.N. Borozdin, R. Lumia, J. Wood,
and W.C. Priedhorsky, "Smart Radiation Sensor
Management; Nuclear Search and Mapping using Mobile Robots,"
IEEE Robotics & Automation Magazine, Vol
15, Issue 3, pp. 85-93, 2008
R. A. Cortez, H. G. Tanner and R.
Lumia, “The Entropy of Cooperative Radiation
Sensing by Distributed Sensors,” 2nd ANS
International Joint Topical Meeting on Emergency Preparedness
& Response and Robotic & Remote Systems, March 2008
(in print).
R. A. Cortez and H. G. Tanner, “Radiation
Mapping Using Multiple Robots,” 2nd ANS International
Joint Topical Meeting on Emergency Preparedness & Response
and Robotic & Remote Systems, March 2008 (in print).
R.A. Cortez, X. Papageorgiou, H.G.
Tanner, A.V. Klimenko, K.N. Borozdin and W.C. Priedhorsky,
"Experimental Implementation of Robotic Sequential
Nuclear Search," IEEE Mediterranean Conference
on Control and Automation, 2007 pp 1-6
A. Kumar, H.G. Tanner, A.V. Klimenko,
and W.C. Priedhorsky, "Automated Sequential
Search for Weak Radiation Sources," 14th IEEE
Mediterranean Conference on Control and Automation, June
28-30, 2006, Università Politecnica delle Marche,
Ancona, Italy, pp 1-6.
A.V. Klimenko, W.C. Priedhorsky,
H. Tanner, K.N. Borozdin, and N. Hengartner, “Intelligent
Sensor Management in Nuclear Searches and Radiological Surveys,”
ANS Transactions, vol 95, pp 21-22, 2006.
K. N. Borozdin, A. V. Klimenko,
W. C. Priedhorsky, N. W. Hengartner, C. C. Alexander, R.
A. Cortez, and H. G. Tanner, "Optimized Strategies
for Smart Nuclear Search," 2006 IEEE Nuclear
Science Symposium and Medical Imaging Conference, San Diego
CA, pp 926-928
|
Task-driven
multi-formation control for coordinated UAV/UGV ISR missions
Funded by:
Sandia National Labs
Overview
In this project we developed cooperative
control algorithms that coordinate formations of Unmanned
Aerial and Ground Robotic Vehicles for autonomous intelligence
gathering, surveillance and reconnaissance (ISR). We devised
a search strategy that is based on the different capabilities
of these heterogeneous units, and exploits the size of the
groups to execute formation coverage and coordinated parallel
scanning of an area of interest. Within this context we
proposed new types of formation and flocking control algorithms,
as long as a combination of a consensus protocol with a
particular TDMA-like communication scheme that makes the
flocking algorithm robust to communication delays. |

A group of four UAVs orbit over a moving
UGV formation. They move on spiral orbits while their scanning
footprints (marked by the conical regions) keep track of
the formation perimeter.

Groups of UGVs secure an area of interest
by falling into formation. Their formation decomposes the
area into rectangular segments and their sensors can detect
target crossings over the boundaries. Then the area is swept
by a formation of UAVs.
Watch the video
here. |
Pubications
Herbert G. Tanner and Dimitrios Christodoulakis,
“Decentralized Cooperative Control of Heterogeneous
Vehicle Groups,” Robotics and Autonomous
Systems, vol 55, no 11, pp 811-823, 2007
Herbert G. Tanner, “Switched
UAV-UGV Cooperation Scheme for Target Detection,”
IEEE International Conference on Robotics and Automation,
2007 pp. 3457-3462
Herbert Tanner and Dimitrios Christodoulakis,
"Cooperation between Aerial and Ground vehicle
groups for Reconnaissance missions," 45th
IEEE Conference on Decision and Control, 2006 pp. 5918-5923
Herbert G. Tanner and Dimitrios
K. Christodoulakis, "The stability of synchronization
in local-interaction networks is robust with respect to
time delays," 44th IEEE Conference on Decision
and Control, 2005, pp 4945–4950. |
|