Rendezvous in Geophysical Flow
ONR
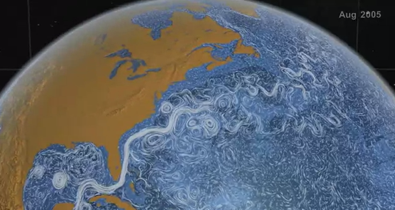
More than 70% of the Earth’s surface is covered in water. There is a great need to survey, monitor, and search over large swaths of ocean, either for monitor algae, measure water quality, or track the dissipation of pollutants. Miniature, inexpensive, semi-passive drifters can be deployed in numbers to form a large-scale sensor network over an aquatic environment for survey purposes, but in order to maximize their deployment time, given their limited resources, it makes sense to use the natural current and “ride” this flow as they make their way through the ocean. How the floaters can make the most use of this ambient resource and harvest this energy from their physical environment to perform their survey task is one big part of this collaborative research effort.
At the same time, the limited storage and communication capabilities of the drifters require novel solutions to the data management problem: can we use more capable autonomous vehicles to either heard or rendezvous with the drifters to allow the latter to upload their data “catch?” How do the drifters need to coordinate between themselves and with their “data mules” to maximize the efficiency of the data transfer and optimize the deployment of the overall network?
Synchronous Rendezvous in Geophysical Flows
May 6, 2016
In this collaborative project with Drexel University, we are investigating how to coordinate active floaters with limited mobility and communication capacity, with more capable underwater or surface robotic vehicles, in order to establish a reconfigurable sensor network that exploits the physics of their ambient environment.