Cyber-Physical Systems
NSF
Collaborative work between University of Delaware and Boston University
Autonomous agents capable of interacting with their physical environment are subject to constraints in terms of what actions they can perform after certain other actions. For example, a robot that is holding a pencil in its gripper cannot pick up another object with this same gripper before dropping the one that is currently holding. These type of logical constraints, impose interdependencies between the tasks or the actions that an agent is capable of doing.
Similar type of constraints we see in natural languages, and specifically in phonology. In any natural language, there are some sounds (phonems) that naturally come after other sounds in the words of the language. Other sounds simply don’t go together -they don’t sound right. The key insight in this project is to adapt efficient models and methods that computational linguists are using to capture the early acquisition of language and transfer them over to the field of hybrid dynamical systems. We develop new theories for planning, control synthesis, and learning in engineered systems that interact with each other and with their environment. Our current approach combines elements of game theory with grammatical inference and hybrid systems abstraction to produce new symbolic control synthesis methods.
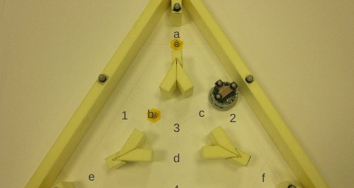
The following is a video of our implementation of our algorithms for grammatical inference and symbolic LTL control synthesis.
Code (in python) that implement our learning algorithms and carry out the special operations of (semi)automata composition in the above demo can be found at :
https://github.com/prarobo/cps_multi_agent
Check out also the related NSF Science Nation article.
This material is based upon work supported by the National Science Foundation under Grant No. 1035577. Any opinions, findings and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation.
Control and learning
Jul 15, 2010
We draw analogies between the grammatical and phonological rules that apply to natural languages, and the type of constraints found in the sequential execution of robotic tasks, to find new ways to control and enable learning in engineered systems.
Publications
-
• Behavior modeling for hybrid robotic systems. MSc Thesis. University of Delaware. (2011).
-
•(Sub)regular robotic languages. 19th IEEE Mediterranean Conference on Control and Automation. pp. 321-326 (2011).
-
•Tier-based Strictly Local Constraints for Phonology. 49th Annual Meeting of the Association for Computational Linguistics. pp. 58-64 (2011)
-
•An algebraic characterization of strictly piecewise languages. Theory and Applications of Models of Computation. LNCS 6648 pp. 252-263. Springer (2011)
-
•Sentence and Word Complexity. Science (2011)
-
•LTL robot motion control based on automata learning of environmental dynamics. IEEE International Conference on Robotics and Automation (2012)
-
•Optimal planning on register automata. IEEE American Control Conference (2012)
-
•Learning with lattice-structured hypothesis spaces. Theoretical Computer Science. (2012)
-
•Learning subregular classes of languages with factored deterministic automata. 13th Meeting on Mathematics of Language. (2013)
-
•Receding horizon control in dynamic environments from temporal logic specifications. Robotics: Science and Systems. (2013)
-
•What complexity differences reveal about domains in language. Topics in Cognitive Science. (2013).
-
•A receding horizon algorithm for informative path planning with temporal logic constraints. IEEE International Conference on Robotics and Automation. (2013)
-
•Temporal logic control for an autonomous quadrotor in a nondeterministic environment. IEEE International Conference on Robotics and Automation. (2013)
-
•Incremental synthesis of control policies for heterogeneous multi-agent systems with linear temporal logic specifications. IEEE International Conference on Robotics and Automation. (2013)
-
•Distribution temporal logic: combining correctness with quality of estimation. IEEE Conference on Decision and Control. (2013)
-
•Adaptive planning in unknown environments using grammatical inference. IEEE Conference on Decision and Control. (2013)
-
•Bottom-up Symbolic Control and Adaptive Systems: Abstraction, Planning, and Learning. PhD Thesis. University of Delaware (2013)
-
•Sampling-Based Temporal Logic Path Planning. IEEE International Conference on Intelligent Robots and Systems (2013)
-
•Adaptive symbolic control for finite-state transition systems with grammatical inference. IEEE Transactions on Automatic Control. (2014)
-
•Strictly Local Phonological Processes. PhD Thesis. University of Delaware (2014)
-
•Temporal Logic Inference for Classification and Prediction from Data. Hybrid Systems: Computation and Control (2014)
-
•An Automata-Theoretic Approach to the Vehicle Routing Problem. Robotics: Science & Systems (2014)
-
•Reactive Sampling-Based Temporal Logic Path Planning. IEEE International Conference on Robotics and Automation (2014)
-
•Learning Strictly Local Subsequential Functions. Transactions of the Association for Computational Linguistics (2014)
-
•Very Efficient Learning of Structured Classes of Subsequential Functions from Positive Data. Proceedings of the 11th International Conference on Grammatical Inference (2014)
-
•Symbolic Planning and Control Using Game Theory and Grammatical Inference. Engineering Applications of Artificial Intelligence (2015)
-
•Strictly local phonological processes. PhD Thesis.
-
•Concurrent Multi-Agent Systems with Temporal Logic Objectives: Game Theoretic Analysis and Planning Through Negotiation. IET Control Theory & Applications (2015)
-
•Information-Guided Persistent Monitoring Under Temporal Logic Constraints. American Control Conference (2015)
-
•Temporal Logic Control for Stochastic Linear Systems Using Abstraction Refinement of Probabilistic Games. Hybrid Systems: Computation and Control (2015)